Since Emoro can be programmed with
BASCOM-AVR and I like Robots , I got my hands on the Emoro Alka Knight.
Basicly the Robot KITS are the same but there are different flavours.
Please notice that the pictures I took
might not do justice to the product since I am not a skilled photographer.
The KIT is shipped in a big box. This box
is filled with all material.

There is a 241 page instruction manual.
And there is a CD-ROM with schematics,
video instructions, the book in PDF, datasheets , drivers, samples and a BASCOM
DEMO and WinAVR, AVR Studio, Flowdraw, etc.
The KIT can be programmed with various
simple languages. This can be done using a windows program such as flowdraw and
in that case you control the Robot with the windows program. You can also make
the Robot autonomous by programming firmware with BASCOM or WinAVR. I only
looked at the Robot from a BASCOM-AVR perspective.
A certificate for Flowdraw is included too.
I recommend viewing the animation videos
first before assembling the Robot.
These videos show the construction in full
detail.
Then it is important to realize that there
are different flavours of the robot but the book is suited for all of them.
This means that some instructions can be skipped.
The second important thing to notice is
that the servos may look the same but are different.
The packages are clearly labelled and one
package is for the drive (wheels) and the other pair is for controlling the
lance. So identify the Robot you have and follow the instructions for your
model.
Enthusiast as I was I began constructing
and prepared the wheels for a gearbox while my model uses direct servo drive.
The wheels have good quality tires. In fact
all of parts of the KIT are of high quality.
The Alka Knight has an omni wheel.
Ballcaster and Twinmotor are optional.
After my mistake with the wheels I read everything
more careful and I understood to read/skip specific parts in the manual. Like
mentioned before, it is important to use the Drive Servos for the wheels.
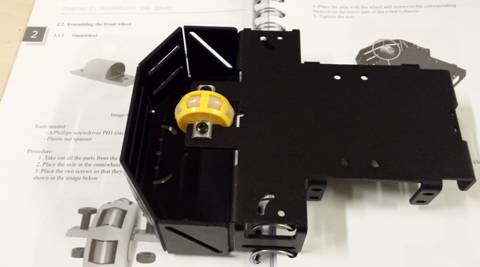
Assembled frame with Omni-wheel.
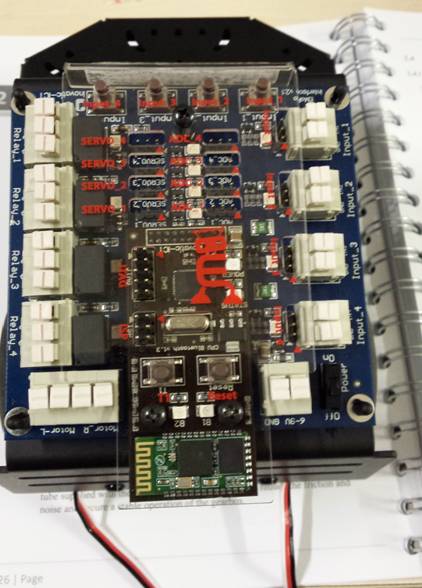
Almost done with assembling. As you can see
the board is protected by a transparent shield.
The processor board has a BT module , a
reset and a generic button. The board also has a JTAG and ISP connector.
All hardware can be accessed with connectors
so you do need to solder anything.
The battery box is hidden under the board
and requires six 1.5V batteries. While it is possible to use batteries, it is
recommended to use 1.2V rechargeable batteries.
Assembling will take a few hours (watching
videos, reading the book and assembling. Take enough time for assembling.
Before connecting the wires make sure the
board power switch is OFF.
The frame has holes and slots so you can
route the wires to the proper position. The wires from the picture are from the
drive servos.
While all sensors used (LCD and switch) are
not sensitive for polarity, the servo wires are!
Like mentioned before, there are different
models and you can also buy additional and different sensors and board so just
read the appropriate sections in the book.
I would advise to assemble the lance last
after everything is tested.
The book is very clear with step by step
mounting instructions and some pages like the wiring instructions are in color
to eliminate connection errors.
The firmware in the processor creates a
Bluetooth link and the BT data is sent to the controller and vice versa. This
mode requires a PC to control the robot.
A BlueTooth dongle is part of the KIT and
after you have installed it, you will have 2 additional COM ports.
For autonomous operation you need the ISP
programmer. An STK500 compatible programmer is included. Do notice that once
you use the ISP programmer, the original firmware will be erased. That is not a
real problem since can program the original firmware back in the controller
when you need to.
Chapter 4 describes the controller board in
detail and the installation of the USB drivers.
Chapter 5, 6 and 7 describe installation of
the various software one could use.
Chapter 8 has various bascom-avr sample programs.
The first running light demo van be used to
test the hardware. It is nice and simple.
Example 2 steps up with an conditional
input. Here you learn how to act on conditions.
Not all examples will work since some are
intended for different hardware.
For example the IR sensor demo will not
work since Alka Knight does not use IR sensors.
Example 4 uses the drive servos. Here you
learn how to drive forward and backward.
The appendix teaches basic electronics. How
to use the relays normal open and normal closed contacts, to switch a light
on/off.
The working of RC motor servos is
explained as well. You also learn how to align the servo position.
You will also find schematics for all
available boards and add-on boards.
On the CD you will find the sample code for
the various boards.
You would need to load the samples from the
EMoRo USB folder since these sample use the AT90USB162 processor used on the
board.
The line follower program requires that you
draw a black line on a white background. Any good contrast will work as well.
The simplest method to get a good black line is to use black isolation tape.
The robot will follow the black tape.
When you are done with the samples you can
use your imagination and you can combine the sample programs. I would recommend
to mount the lance when you have mastered the working of the robot.
The chassis is light weight and sturdy
metal and you can mount the 2 Alka Knight servos on a different location too.
The drive sensors can rotate continuous so these can only be used for driving.
The other servos have a stop. These can be used to control levers.
With some Meccano you can extend
mechanically.
You could build your own Dalek. The servos
have enough power to take some additional weight. Or you can add a simple IR
receiver and use GETRC5 and a universal IR transmitter to control the Robot.
Like the box suggests, young kids need help
of an adult. The animation videos are wonderful and clear up about everything.
Take time to watch them before you assemble and do not watch them afterwards
like me.
Because of the versatility and
possibilities and comprehensive instructions this is an excellent Robot Kit for
education and kids. Wiring is easy because of the push connectors.
When you use a PC to control the Robot, the
easyflow will work simple enough.
When you want to use the Robot stand alone
you can program in Bascom AVR. This requires that bascom-AVR is installed and
typically an older aged kit that is able to read English.
This is not a simple LEGO kit where you
click and go. This is for technical interested people, young and old who like
to use their imagination.
The Inovatic site also has a download
section with more info and samples.
To conclude I can recommend the EmoRo
highly. While at first glance it seems expensive but it is worth the money.
More info:
EMoRo Educational
Mobile Robot
Web page www.inovatic-ict.com