Tricopter Shrediquette by William Thielicke
Read this
Once in a while we find discover a great application that is programmed with bascom. Some times such an application can be turned into an AN. In this case we only created a partial AN to give you an idea about the Tricopter project from William Thielicke. All the text and images are from Williams website. You will find a full description, source code, a manual, demo video's and much more at Williams webblog. MCS
Introduction
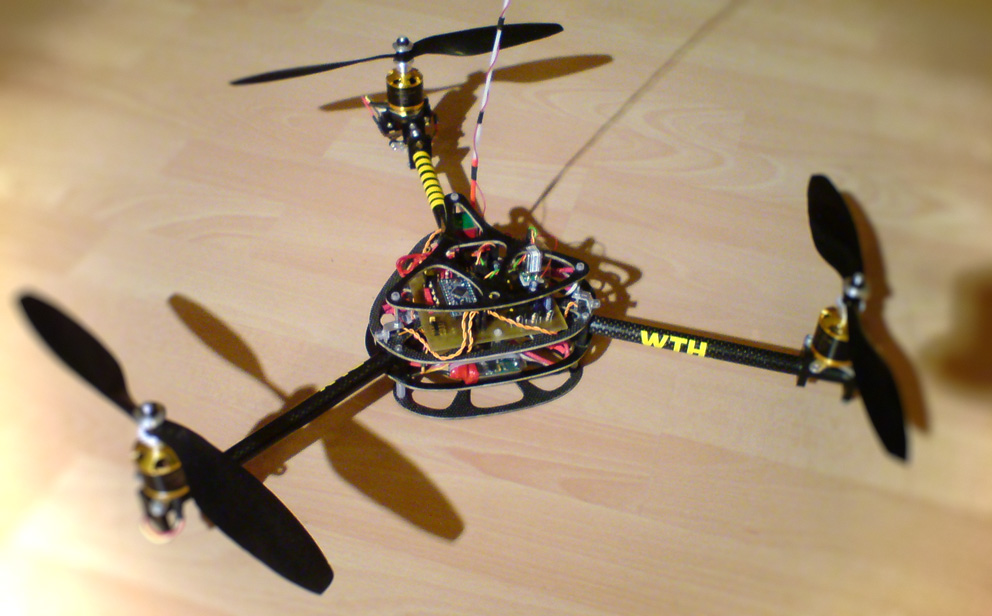
A tricopter is a flying thing that uses three motors + propellers (arranged in a horizontal triangle) to stay airborne.
The speed of each of these motors can be controlled independently. Additionally, the motor at the rear can be rotated left and right via a servo. One propeller turns clockwise; two propellers turn counter-clockwise to minimize torque. Gyroscopes (measuring angular velocity) and accelerometers (measuring accelerations, like gravitation) are used to stabilize the inherently unstable system. The pilot can control the tricopter with a remote control. Height, nick, roll and yaw are controlled via 2 sticks on the remote control. A 3-position switch turns on the motors and selects control mode. Hence a 5-channel transmitter & receiver is needed.
This specific tricopter uses two different control modes: Firstly, "hover mode", where the pilot controls the angle of the tricopter. Moving the sticks 10 degrees tilts the tricopter ~10 degrees. The copter will begin to accelerate in the desired direction. If you release the sticks, the copter will automatically level. But it will keep the velocity it had before (if we disregard aerodynamic drag). The tricopter can hover on its own in this flight mode if there is no wind and if there is some space.
Secondly, "aerobatic mode", where the pilot controls the angular velocity of the copter. Moving the sticks 10 degrees will result in slow rotation of the tricopter (maybe 10 degrees per second). Moving the sticks further will result in faster rotation. The copter will always keep the angle it had if you release the sticks. This mode is very useful when doing aerobatics or flying around for fun. The tricopter flies like a regular RC helicopter in this mode. Yaw control is always "heading-hold" = angular velocity control.
The propellers that you are using for your tricopter should match your motors. They should also be as light as possible, as this allows for an efficient stabilization. Maxxprod has some very light propellers. APC Slowfly propellers are too heavy.
Things to consider before takeoff
When thinking about the first take-off of the tricopter you have to consider some specialties (I think these apply to all multicopters): When starting the motors, Shrediquette instantly tries to control its attitude. If the floor is not 100% leveled (this will always be the case
), the tricopter thinks that it is not in level flight. It will try to correct for that, but the poor thing can't! It's still on the ground and leveling is only possible in flight. The integral parts of the PID control loop are responsible for this behavior. The measured error sums up and becomes bigger and bigger. Therefore the tricopter tries to correct more and more. There are two work-arounds: You can start the motors and immediately take-off, or you can simply get used to this behavior and accept that the tricopter won't level perfectly during the first 1-3 seconds of flight. The latter is what I do. When switching from hover mode to acro mode and vice versa, the integrals are deleted (or replaced with the angle estimation from the accelerometer). So if you think that Shrediquette was desperately trying to level without succeeding, switch to acro mode and back to hover mode to let it try again. If you want to turn off the motors, bring the 3-stages switch to the off position. Your motors won't turn off until you also brought the throttle stick to a position close to minimum. Thats a safety feature, because I already managed to accidentally turn off the motors while I was flying pretty high. Shrediquette is not a good glider I must admit. First flight should be done in hover mode by holding the tricopter in your hands and increasing throttle slowly. Keep in mind: Don't grab it too hard, the tricopter must be fully able to control its attitude in all axes; otherwise "strange" things might happen.
Some illustration video can be see here
|























