|
AN #40 - Infrared Proximity Distance Measurement |

|
by K.S.Sankar - Mostek Electronics ( www.mostek.biz )
Originaly published in ELECTRONICS FOR YOU magazine ( INDIA - W W W . E F Y M A G . C O M )
Infrared proximity detectors are commonly used in robotic
projects in sensing obstacles. If you need to measure the approximate distance
from the object for wall following or
maze solving robot projects, you need to use ultrasonic or reflective
unmodulated light sensing circuits using expensive components. This circuit that
can be used with ATMEL AT89c2051 to
generate a 38k burst frequency of IR and receive it using Siemens SFH5110
receiver to calculate an approximate distance from the reflected object.
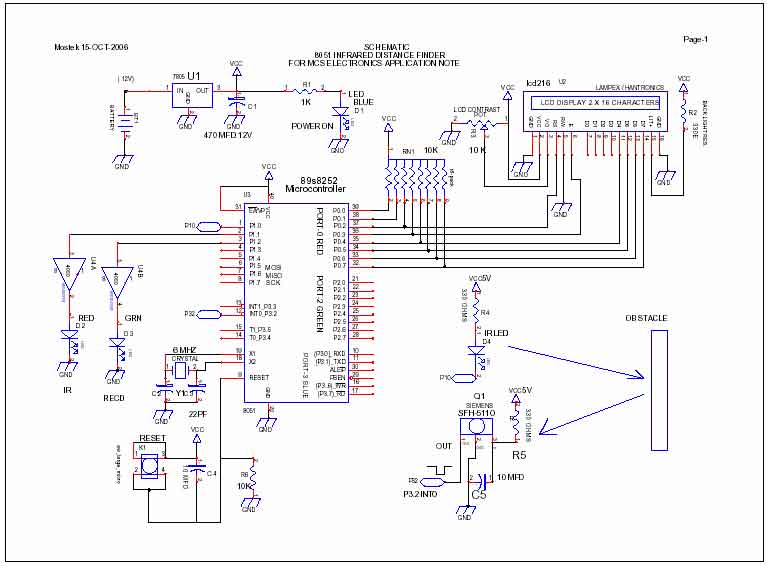
This article uses AT89s8252 and an lcd
for demonstration. Int-0 multiple count generated
during the IR 38k Burst is used to find out the distance with INT edge triggering
turned OFF . On experimenting , we found the count vary from 0 to about 900 for
an object distance of 12 down to 3. A
comfortable variation in value to experiment with - in close proximity sensor
projects.
IR modulation is normally done using a
555 wired as a square wave oscillator. To reduce the number of components, the software
generates the frequency through a port pin with the correct time delay between
ON/OFF periods. With a 6 Mhz xtal, the time period is too short, so NOPs are
used for the timing with two BYTE variable loops in the software that sends a
burst of 38 Khz for a duration of about 1/0th of a second.
The
final count can be used in the project to find the approximate distance if the
object . Two leds indicate the IR xmit in progress and IR recd.
The source
code is given below: '--------------------------------------
' mcs80prox.bas 14-10-2006
' (c) by k.s. sankar
www.mostek.biz chennai / madras India
' written in bascom-51
micro controller
' embedded visual basic
language for 8051 family of micros
' from www.mcselec.com
holland
' max 900 count for close
reflection
'---------------------------------------
''''$regfile =
"89c2051.dat"
$regfile = "89s8252.dat"
' the micro controller's
include file
$crystal = 6000000
'6 mhz crystal used
Config Lcd = 16 * 2
Config Lcdpin = Pin , Db4 = P0.4 , Db5 = P0.5 , Db6 = P0.6 , Db7 = P0.7
Config Lcdpin = Pin , E = P0.3 , Rs = P0.2
' define variables below
Dim Irrecd As Bit
Dim Ircount As Integer
Declare Sub Fn38k6()
Irrecd = 0
Ircount = 0
' another name for port pin
p1.0
Irport Alias P1.0
' make all ports 0
P0 = 0
P2 = 0
P1 = 0
P3 = 0
P3.2 = 1
' make port-3.2 int0 high
for interrupt to work
' on interrupt - call
int0_int fuction
On Int0 Int0_int
Reset Tcon.0
' int enabled... NOT edge
triggered
Enable Interrupts
Begin:
Ircount = 0
' show IR xmit mode on
port-1
P1.1 = 1
' enable int0
Enable Int0
Call Fn38k6
' send out a beam for
1/10th of a second
' of IR at 38khz freq
' int would have taken
place if ir was reflected recd
Disable Int0
' disable int
' check if int occurred
If Irrecd = 0 Then
' no int occured
P1.1 = 0
' flash standby led
Waitms 100
' wait for ( 1/10th of a second)
Goto Begin
End If
' here int recd
' show ir count..related to
distance
Home
Lcd "ircount=" ; Ircount ; " "
Irrecd = 0
P1.2 = 1
' confirm led ON
Waitms 255
P1.2 = 0
Goto Begin
' =-=-=-=-subroutines below
=-=-=-=-=-=-=
Sub Fn38k6()
' function to oscillate IR
port pin
' at 38,000 times a sec for
1/10th second
Dim Jj As Byte , Kk As Byte
Jj = 0
While Jj < 10
Incr Jj
Kk = 0
While Kk < 255
Incr Kk
Irport = 1
NOP
Irport = 0
NOP
NOP
Wend
Wend
End Sub
' = - = - = - = - = - = - =
- = - = - = - = - = - = -
' The Interrupt Handler For
The Int0 Interrupt
Int0_int:
Irrecd = 1
Incr Ircount
' set a flag , increment a counter and return
Return
' - - - - - - - - - -
' end 788 bytes
' -=-==-=-=-=-=-=-=-=
Schematic below:
|